
Тензометр сигнал — компонент. Предназначен для работы с данными, поступающими с канала тензодатчика. Служит для получения механических напряжений в конструкциях.
Внешний вид компонента
| Режим проектировщика | Режим оператора |
|---|---|
 |
Не имеет |
Параметры:
Входные
- Канал — измерительный канал, на который поступает сигнал, у которого нужно измерить требуемые величины;
- Опора — опорный канал;
- Сброс — значение, в которое сбрасывается текущий показатель;
- Сброс — при подаче на этот контакт происходит сброс значения;
- Вкл\Выкл — включение и выключение тензометра.
Выходные
- Число(Yn) — выходные значения тензометра;
- Канал — виртуальный выходной канал, с которого поступают мгновенные значения, получаемые с тензометра.
Настраиваемые свойства:
Общие свойства (окружение)
Частные свойства (в скобках значение, установленное по умолчанию):
- Unit — указание единиц измерения.
- measuretype (Относительные) — тип измерений:
- Абсолютные.
- Относительные (значение единиц относительно опорного канала);
- powertype (Переменный ток) — тип питания датчика;
- Постоянный ток.
- Переменный ток — расчет значений будет проводиться по алгоритму селективного вольтметра, и, соответственно, измерительная схема (первичный преобразователь) должна быть запитана переменным током.
- Smooth (100) — сглаживание (время в [мс], за которое будет проводиться усреднение измеренных значений);
- Inversion (false) — отвечает за изменение знака измерений (позволяет инвертировать режим работы тензодатчика: сжатие-растяжение и наоборот);
- mode ( Тензодатчик) — режим работы датчика:
- Тензорезистор — в этом режиме;
- Тензодатчик — в этом режиме нужно ввести значение Sensitivity (чувствительности, мВ/В) и Limit (предел измерения в единицах Unit).
- Sensitivity (1) — чувствительность тензодатчика, мВ/В;
- Limit (10) — предел измерения тензодатчика;
- UseClbFile (false) — разрешение использования калибровочного файла, в котором находятся сохраненные ранее настройки и калибровочные таблицы для тензорезистора;
- ClbFileName — указывается путь к калибровочному файлу тензорезистора;
- Value (0) — число, в которое сбрасывается текущее показание;
- Activate (false) — состояние работы;
- ZeroBalance — текущая балансировка нуля.
Программирование
При использовании компонента в сценарии и программируемом компоненте (скрипте) необходимо учитывать диапазоны значений подаваемых на входные ножки компонента, диапазоны значений свойств компонента, а также диапазоны значений параметров методов компонента.
Параметры:
Входные
- Канал — канал, к которому подключается измерительный канал (от 0 до (количество каналов — 1));
- Опора — канал, к которому подключается питание измерительного моста (от 0 до (количество каналов — 1));
- Сброс — значение, в которое сбрасывается текущее показание (любое число).
Настраиваемые свойства:
Общие свойства (окружение)
Частные свойства (в скобках значение, установленное по умолчанию):
- BSTR Unit — установка и чтение единицы измерения (строка);
- BSTR MeasureType — установка и чтение типа измерений: Абсолютные; Относительные (строка);
- BSTR PowerType — установка и чтение питания: Постоянный ток; Переменный ток (строка);
- FLOAT Smooth — установка и чтение длины сглаживания, мс (число).
- VARIANT_BOOL Inversion — установка и чтение инвертирование измеренного значения нагрузки:
- true — Включено инвертирование измеренного значения нагрузки;
- false — Выключено инвертирование измеренного значения нагрузки.
- BSTR Mode — установка и чтение режима измерений: Тензорезистор; Тензодатчик (строка);
- FLOAT Sensitivity — установка и чтение чувствительности тензодатчика, мВ/В (число);
- FLOAT Limit — установка и чтение предела измерений тензодатчика (число);
- VARIANT_BOOL UseClbFile — установка и чтение разрешения использования файла калибровки для тензорезистора:
- true — Включено разрешение использования файла калибровки для тензорезистора;
- false — Выключено разрешение использования файла калибровки для тензорезистора.
- BSTR ClbFileName — установка и чтение файла калибровки тензорезистора (строка);
- FLOAT Value — установка и чтение числа, в которое сбрасывается текущий показатель (число);
- VARIANT_BOOL Activate — установка и чтение состояния работы тензометра:
- true — Состояние работы тензометра включен;
- false — Состояние работы тензометра выключен.
- FLOAT ZeroBalance — установка и чтение балансировки нуля (число).
Пример
Более подробно об использования Тензометра можно ознакомиться на официальном сайте, по ссылкам:
1. Ссылка №1.
2. Ссылка №2.
Математическое описание
В основе работы тензорезистивных преобразователей лежит свойство материалов изменять свое электрическое сопротивление при механических деформациях под действием приложенной силы. Конструктивно большинство тензорезисторов (рис. 1) выпускается в виде проводников, жестко связанных с бумажной или пленочной основой 2. Проводник 3 представляет собой так называемую решетку из зигзагообразно уложенной тонкой проволоки диаметром 0,02-0,05 мм, к концам которой пайкой или сваркой присоединяются выводные медные проводники 4. Сверху проводники закрываются бумагой или пленкой или покрываются лаком 1. После наклеивания подложки тензорезистора на поверхность деформация этой поверхности передается проводниками и приводит к изменению их сопротивления.
Рисунок 1.
Как видно на рисунке 1 датчик состоит из основы, на которую нанесен проводящий слой, образующий змейку, на “поворотах” толщина проводника увеличена для снижения чувствительности на растяжение перпендикулярной основной оси. Основная ось проходит вдоль линий направления змейки (на рисунке по горизонтали) и растяжение датчика вдоль этого направления вызывает максимальное изменение сопротивления датчика. Сверху датчик покрыт слоем прозрачного ламината, который защищает резистивный слой от повреждений. На датчике также нанесены метки, указывающие направление осей, упрощающих его установку, обычно проходят через центр датчика под углами 90°,±45° относительно основной оси чувствительности. При построении системы контроля нагрузки на различные механические конструкции обычно применяется несколько тензодатчиков или системы датчиков, оси которых пересекаются под различными углами, либо идут параллельно, поэтому для упрощения монтажа обычно используют датчики, имеющие несколько тензорезистивных элементов и уже расположенных под определенным углом.
Известно, что под действием силы или системы сил на металлический предмет он начинает деформироваться, причем до точки предела текучести материала деформация носит упругий характер и подчиняется закону Гука. Это означает, что при снятии силы предмет принимает исходные размеры, а величина напряжения равна линейной деформации умноженной на модуль Юнга. Формулы для расчета напряжения и деформации приведены ниже:
![]()
![]()
![]()
где ε – линейная деформация, E – модуль Юнга, σ – напряжение, F –сила приведшая к деформации, S – площадь поперечного сечения, на который эта сила действует, L – исходная длина, Δ – изменение длины под действием силы. Существует также понятия продольной и поперечной деформации. Продольная деформация – это деформация тела вдоль линии действия силы. Поперечная – деформация тела относительно оси, перпендикулярной направлению действия силы. Их отношения называются коэффициентом Пуассона:
![]() .
.
Для тензорезистивных датчиков основная формула выглядит следующим образом:
![]()
где ΔR – изменение сопротивления тензодатчика вызванное деформацией ε, K – коэффициент тензочувствительности датчика (табличная величина), R – исходное сопротивление. Если подробнее расписать это выражение, то получим:
![]()
Из формулы вытекает, что изменение сопротивления тензодатчика, установленного на металлическую балку, поперечного сечения S, прямо пропорционально площади поперечного сечения балки и модулю Юнга. Измерив изменение сопротивления тензодатчика, можно рассчитать нагрузку на рассматриваемую балку, зная ее поперечное сечение и свойство материала из которого она изготовлена. Эта формула верна только для случаев растяжения/сжатия.
Для ситуации изгиба весь процесс выглядит несколько иначе, поскольку деформация рассчитывается сложнее. Нужно учитывать форму поперечного сечения балки и расстояние от места приложения силы к центру тензодатчика. Деформация в этом случае может быть рассчитана следующим образом:
![]()
где M – момент силы, Z – момент сопротивления сечения. Для различных вариантов размещения тензодатчика, крепления балки, и местоположения точки приложения силы рассчитывается различными способами.
Таблица 1. Расчет момента силы для различных вариантов положения балки и тензодатчика.
Таблица 2. Расчет момента сопротивления сечения для различной конфигурации сечения.
Для мониторинга крутящего момента используются тензодатчики, расположенные на балке под углом 45° относительно оси вращения рисунок 2. Используется один, два или четыре датчика. При установке двух датчиков их оси располагаются под углом 90° относительно друг друга и под углом 45° и -45° относительно оси вращения. При этом один из датчиков испытывает деформацию сжатия, другой – растяжения. При использовании четырех тензорезисторов они располагаются “крестиком”.
Рисунок 2.
Вращающее усилие может быть рассчитано следующим образом: ![]()
где ν – коэффициент Пуассона, T – вращающий момент, E – модуль Юнга, Zp – угловое сопротивление сечения. Для цельного цилиндрического стержня: ![]() .
.
Для цилиндрической полой трубы с внешним диаметром d2 и внутренним d1: ![]()
Поскольку ΔR очень малая величина по сравнению с R, то измерение ее производят, включив датчик в схему моста Уитстона.
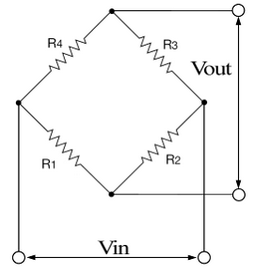 Рисунок 3.
Рисунок 3.
Принцип измерения основан на взаимной компенсации сопротивлений двух звеньев, одно из которых включает измеряемое сопротивление. В качестве индикатора обычно используется чувствительный гальванометр, показания которого должны быть равны нулю в момент равновесия моста. На схеме R1, R2, R3, R4 – плечи моста. R3 представляет собой неизвестное сопротивление; R1, R2 и R4 — известные сопротивления, причём значение R2 может регулироваться. Если отношение сопротивлений (R2/R1) равно отношению сопротивлений другого (R3/R4), то разность потенциалов между двумя средними точками будет равна нулю, и ток между ними не будет протекать. Сопротивление R2 регулируется до получения равновесия, а направление протекания тока показывает, в какую сторону нужно регулировать R2.
С помощью гальванометра момент равновесия можно установить с большой точностью, и если сопротивления R1, R2 и R4 имеют маленькую погрешность, то R3 может быть измерено очень точно, ведь даже небольшие изменения Rx вызывают заметное нарушение баланса всего моста. Когда мост сбалансирован:
![]()
Если известны значения всех четырёх сопротивлений, а также напряжение (Vin), то напряжение на плечах моста можно найти, используя формулы делителя напряжения, а затем вычесть их друг из друга, чтобы найти Vout:
![]()
Если наш тензорезистор (R3) будет иметь сопротивление R+ΔR, а остальные резисторы равны R, то имеем:
![]()
так как ΔR очень малая величина по сравнению с R, то напряжение на выходе будет равно:
![]()
При решении задач измерения нагрузки на те или иные конструкции обычно в измерительный мост включается один, два или четыре тензорезистора.
Первый и главнейший фактор – ‘то температура, А вернее ее влияние не только на сопротивление самого тензодатчик. Но и на линейные размеры контролируемого объекта. Существует 2 способа решения этой проблемы:
· Использование термокомпенсированных тензодатчиков.
· Включение в измерительный мост дополнительного тензодатчика.
Рассмотрим второй способ. Для компенсации температурного влияния на баланс самого измерительного моста часто используют дополнительный тензодатчик, включенный в мост таким образом, чтобы изменение его сопротивления, обусловленное дрейфом температуры, было согласованно с изменением сопротивления основного тензодатчика. При этом дополнительный датчик монтируется на балке, к которой не прикладывается усилие, но находящейся под той же температурой, что и контролируемая конструкция. Например для компенсации тензодатчика, включенного как R1 дополнительный тензодатчик ставится на место R4. В этом случае изменение сопротивления, обусловленное изменением температуры на основном тензодатчике, равно изменению сопротивления в дополнительном тензодатчике и баланс измерительного моста сохраняется.
При построении измерительного моста на практике обычно оказывается, что сами датчики находятся на довольно большом расстоянии друг от друга. При этом длина провода может составлять несколько сотен метров. При этом нужно будет также учитывать температурный эффект в проводах.
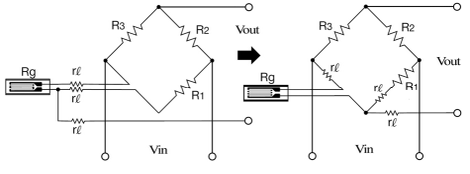
Рисунок 4.
На схеме приведена схема компенсации. Как видно из рисунка, сопротивление двух проводов входят в измерительный мост и компенсируют друг друга, сопротивление третьего соединяют последовательно с выходным напряжением. При использовании измерителя с входным сопротивлением много большим сопротивления резисторов можно не учитывать.