Цифровой энкодер ZET 7060-E





- Измерение расстояния и угла вращения
- Преобразование сигнала с энкодера
- Интерфейс RS-485
- Возможна организация беспроводных каналов передачи данных LoRaWAN или NB-IoT
цена по запросу
Цифровой энкодер ZET 7060-E предназначен для измерения расстояния и угла вращения.
Характеристики
цифровых энкодеров ZET 7060-E
| Метрологические характеристики | |
|---|---|
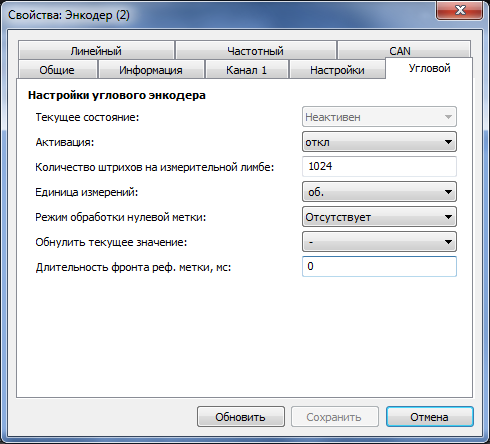
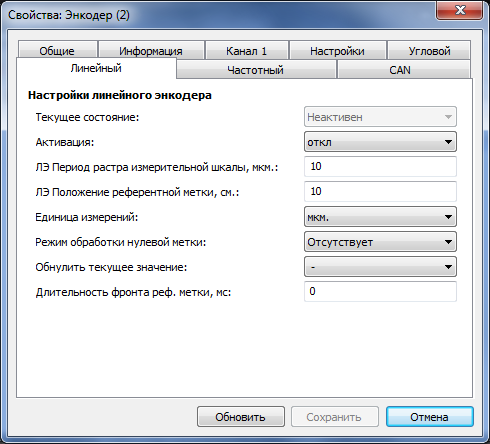
| Измеряемая физическая величина | угол, скорость, перемещение, ускорение |
| Максимальная частота следования импульсов с внешнего датчика | 5 МГц |
| Технические характеристики | |
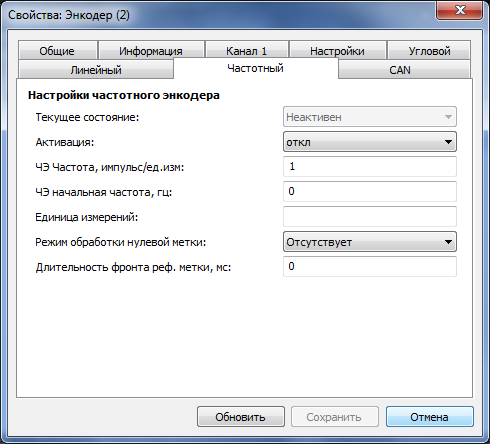
| Тип подключаемых датчиков | Инкрементный угловой энкодер, инкрементный линейный энкодер, датчики с частотным выходом |
| Тип выходного сигнала датчика | Прямоугольный импульсный сигнал (TTL, уровень 5 В или открытый коллектор) |
| Напряжение питания датчика | 5±0,2 В |
| Максимальный ток питания датчика | 150 мА |
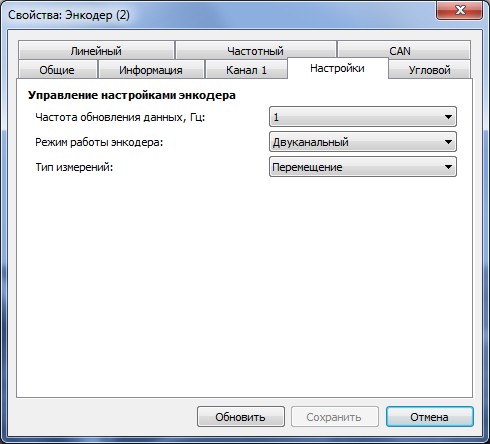
| Частота обновления данных | 1, 10, 50, 100, 200 Гц |
| Интерфейс передачи данных | RS-485 |
| Скорость обмена | 4800, 9600, 14400, 19200, 38400, 57600, 115200 бит/с |
| Контроль четности | 0 — нет контроля, 1 — есть контроль (нечетность, ODD) |
| Протокол обмена | Modbus RTU |
| Эксплуатационные характеристики | |
| Габаритные размеры | 71×39×17 мм |
| Масса | 30 г |
| Питание устройства | от 9 до 24 В |
| Потребляемый ток при напряжении 12 В | до 40 мА |
| Защита от переполюсовки | есть |
| Температурный диапазон эксплуатации* | от -40 до +100 °С |
| Электромагнитная совместимость ЭМС | |
| МЭК 61000-4-2 (IEC 61000-4-2), ESD | контакт 4 кВ, воздух 8 кВ |
| МЭК 61000-4-4 (IEC 61000-4-4), EFT | питание 0,5 кВ, сигнал 0,25 кВ |
| МЭК 61000-4-5 (IEC 61000-4-5), Surge | 500 В |


Назначение
цифровых энкодеров ZET 7060-E
Энкодеры имеют широкую сферу применения в печатной промышленности, металлообработке, лифтовой технике, автоматах для фасовки, упаковки и розлива, в испытательных стендах, а также в роботах и прочих машинах, требующих точной регистрации показателей движения частей.