Синхронизация устройств по GPS — компонент. Предназначен для синхронизации удаленных объектов между собой, а также для привязки синхронизации к шкале единого времени.
Внешний вид компонента
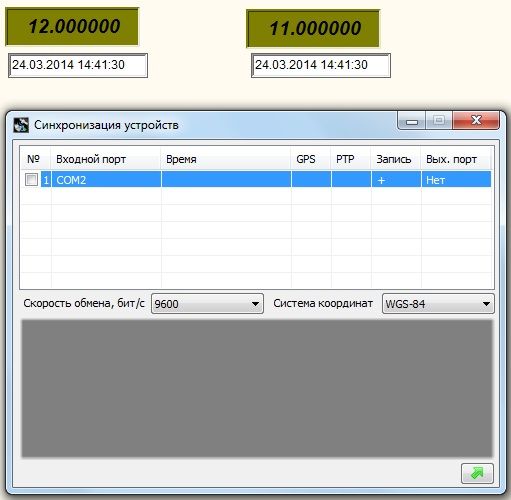
| Режим проектировщика | Режим оператора |
|---|---|
 |
Не имеет |
Параметры:
Входные
Не имеет.
Выходные
- время — время по GPS;
- время — время по GPS;
- широта — широта расположения устройства, град;
- долгота — долгота расположения устройства, град;
- высота — высота расположения устройства, м;
- спутники — количество спутников, по которым осуществляется работа.
Настраиваемые свойства:
Общие свойства (окружение)
Частные свойства (в скобках значение, установленное по умолчанию):
- inputport () — последовательный порт для обмена с GPS-приёмником;
- oututport (нет) — последовательный порт для вывода данных с GPS;
- baundrate(9600) — скорость приёма данных NMEA потока, бит/с.
Программирование
При использовании компонента в сценарии и программируемом компоненте (скрипте) необходимо учитывать диапазоны значений подаваемых на входные ножки компонента, диапазоны значений свойств компонента, а также диапазоны значений параметров методов компонента.
Настраиваемые свойства:
Общие свойства:
Частные свойства :
- BSTR InputPort — установка и чтение последовательного порта для обмена с GPS-приёмником (число);
- BSTR OutputPort — установка и чтение последовательного порта для вывода данных GPS (число);
- BSTR Speed — установка и чтение скорости приёма данных NMEA потока, бит/с (строка):
- 57600 — 57600 бит/с;
- 38400 — 38400 бит/с;
- 19200 — 19200 бит/с;
- 9600 — 9600 бит/с;
- 4800— 4800 бит/с.
Пример
Проект в SCADA ZETView
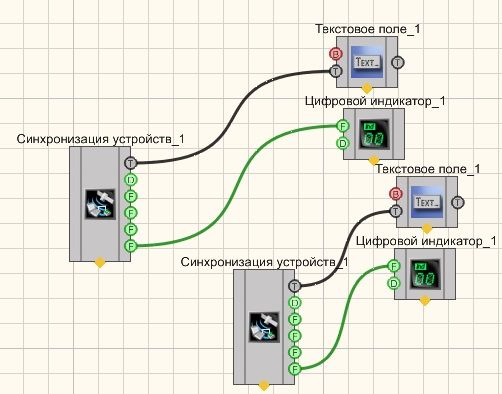
Данный компонент используется для создания различных проектов, в том числе таких как анализаторы спектра частот.
Результат работы проекта