Компонент ПИД-регулятор из таблицы предназначен для регулирования уровня сигнала в соответствии с заданным профилем в таблице.
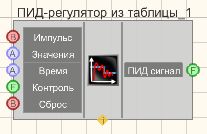
Внешний вид компонента
| Режим проектировщика | Режим оператора |
|---|---|
 |
 |
Параметры:
Входные
- Импульс — при подаче на который импульса происходит запуск/остановка выполнения регулирования.
- Значения — подается числовой массив значений.
- Время — подается числовой массив времени, с.
- Контроль — обратная связь регулируемого компонента.
- Сброс — происходит сброс интегральной составляющей (сумма накопленных ошибок становится равна 0).
Выходные
- ПИД-сигнал — на выходе отрегулированное значение.
Настраиваемые свойства:
Общие свойства (окружение)
Частные свойства (в скобках значение, установленное по умолчанию):
- Value (0) — текущее значение;
- Enable (true) — включение/отключение компонента;
- PropKoef (1) — коэффициент при пропорциональной составляющей (противодействует отклонению регулируемой величины от заданного значения);
- IntegrKoef (0) — коэффициент при интегральной составляющей (учет предыдущих значений, способствует устранению статической ошибки);
- DiffKoef (0) — коэффициент при дифференциальной составляющей (обеспечивает быструю реакцию на отклонение от заданной величины);
- MaxCurrentValue (0) — максимальное значение управляющего сигнала. Если значение 0, то не используется;
- MinCurrentValue (0) — минимальное значение управляющего сигнала. Если значение 0, то не используется.
Дополнительные сведения:
Данный компонент удобно использовать совместно с компонентом «Детерминированный массив» при задании в нем источника данных «из таблицы».
Например:
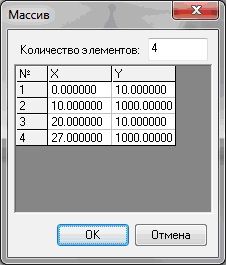
В данной таблице столбец Х используется как массив времени (время указывается в секундах), столбец Y – массив значений. Первое значение массива времени всегда должно быть равным 0, а первое значение массива данных – первое управляющее воздействие, отправляемое управляемому объекту.
Программирование
При использовании компонента в сценарии и программируемом компоненте (скрипте) необходимо учитывать диапазоны значений подаваемых на входные ножки компонента, диапазоны значений свойств компонента, а также диапазоны значений параметров методов компонента.
Параметры:
Входные
- контроль — значение регулируемого параметра для расчёта выходного значения ПИД-регулятора (любое число).
- значения — входной числовой массив для задания значений узлов таблицы регулирования (любое число).
- время — входной числовой массив для задания значения времен, к которым значение регулируемого параметра должно быть равно соответствующему узлу из таблицы регулирования (любое число).
Настраиваемые свойства:
Общие свойства:
Частные свойства :
- VARIANT_BOOL Enabled — установка и чтение состояния работы ПИД-регулятора:
- true — ПИД-регулятор включён;
- false — ПИД-регулятор выключен.
- FLOAT PropKoef — установка и чтение пропорционального коэффициента ПИД-регулятора (любое значение);
- FLOAT IntegrKoef— установка и чтение интегрального коэффициента ПИД-регулятора (любое значение);
- FLOAT DiffKoef — установка и чтение дифференциального коэффициента ПИД-регулятора (любое значение);
- FLOAT MaxCurrentValue — установка и чтение максимального значения выходного сигнала ПИД-регулятора (любое значение);
- FLOAT MinCurrentValue — установка и чтение минимального значения выходного сигнала ПИД-регулятора (любое значение);
- VARIANT_BOOL ProcessVisible — установка и чтение состояния отображения выполнения процесса регулирования:
- true — ПИД-регулятор включён;
- false — ПИД-регулятор выключен.
Методы:
void ResetIntegr(LONG newVal) — устанавливает интегральную составляющую ПИД-регулятора:
- newVal — значение интегральной составляющей (любое значение).
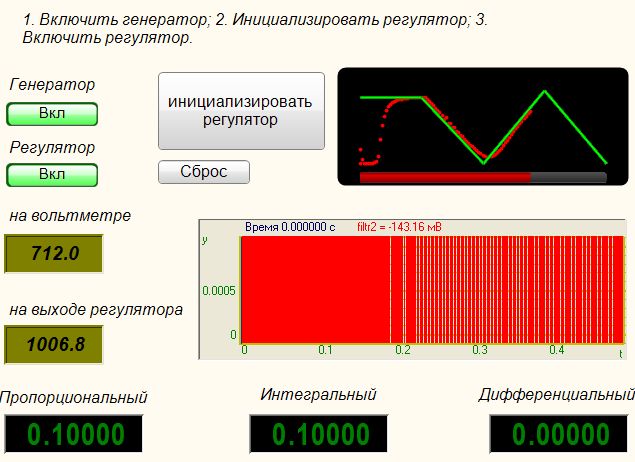
Пример
Проект в SCADA ZETView
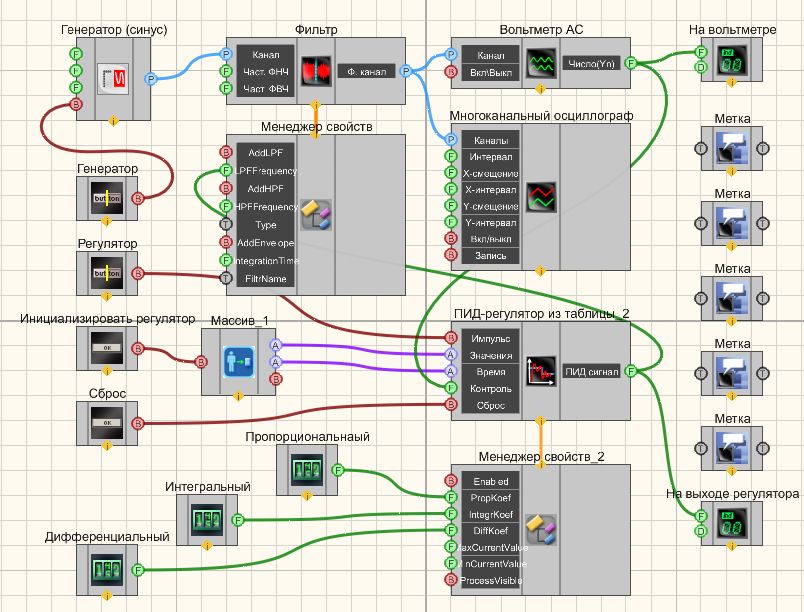
Данный компонент используется для создания различных проектов, в том числе таких как анализаторы спектра сигналов.
Результат работы проекта