
Энкодер — компонент. Предназначен для измерения относительного положения (перемещения), скорости и направления перемещения при помощи оптических датчиков угловых или линейных перемещений (энкодеров), подключенных к входным каналам АЦП. Программа Энкодер порождает виртуальные каналы перемещения и скорости перемещения.
Внешний вид компонента
| Режим проектировщика | Режим оператора |
|---|---|
 |
Не имеет |
Параметры:
Входные
- Канал А — канал фазы А;
- Канал Б — канал фазы Б;
- Канал Б — включение канала фазы Б;
- Метка — канал метки;
- Метка — включение и выключение канала метки;
- Сброс — сброс всех значений в ноль.
Выходные
- Канал x — канал перемещения;
- Канал V — канал скорости.
Настраиваемые свойства:
Общие свойства (окружение)
Частные свойства (в скобках значение, установленное по умолчанию):
- channelA_name — имя канала измерений фазы А;
- channelB_name — имя канала измерений фазы Б;
- channelLabel_name — имя канала измерений метки;
- channelB_enable (true) — включение/выключение канала фазы Б;
- channelLabel_enable (true) — включение/выключение канала метки;
- channelPath_enable (true) — включение/выключение виртуального канала перемещений;
- channelSpeed_enable (true) — включение/выключение виртуального канала скорости;
- units (мм) — выбор единицы измерения:
- мм — миллиметр;
- см — сантиметр;
- м — метр;
- градус — градус;
- оборот — оборот.
- resolution (250) — разрешающая способность энкодера (задается в метках на единицу измерения);
- Level_autoSet (true) — включение/выключение автоматической установки порога;
- Level_low (-2000.000000) — нижний порог (в единицах измерения канала);
- Level_hight (2000.000000) — верхний порог (в единицах измерения канала);
- Invertion (false) — инверсия направления перемещения (необходимое условие — включенная фаза Б).
Программирование
При использовании компонента в сценарии и программируемом компоненте (скрипте) необходимо учитывать диапазоны значений подаваемых на входные ножки компонента, диапазоны значений свойств компонента, а также диапазоны значений параметров методов компонента.
Параметры:
Входные
- Канал А — канал, к которому подключается фаза (канал) А (от 0 до (количество каналов — 1)).
- Канал Б — канал, к которому подключается фаза (канал) Б (от 0 до (количество каналов — 1)).
- Метка — канал, к которому подключается канал метки (от 0 до (количество каналов — 1)).
Настраиваемые свойства:
Общие свойства (окружение)
Частные свойства (в скобках значение, установленное по умолчанию):
- BSTR channelA_name — установка и чтение имени канала измерений фазы А (строка);
- BSTR channelB_name — установка и чтение имени канала измерений фазы Б (строка);
- BSTR channelLabel_name — установка и чтение имени канала измерений метки (строка);
- VARIANT_BOOL channelB_enable — установка и чтение включения канала фазы Б:
- true — включен канал фазы Б;
- false — выключен канал фазы Б.
- VARIANT_BOOL channelLabel_enable — установка и чтение включения канала метки:
- true — включен канал метки;
- false — выключен канал метки.
- VARIANT_BOOL channelPath_enable — установка и чтение включения виртуального канала перемещения:
- true — включен виртуальный канал перемещения;
- false — выключен виртуальный канал перемещения.
- VARIANT_BOOL channelSpeed_enable — установка и чтение включения виртуального канала скорости:
- true — включен виртуальный канал скорости;
- false — выключен виртуальный канал скорости.
- BSTR units — установка и чтение выбора единицы измерения: мм; см; м; градус; оборот (строка).
- LONG resolution — установка и чтение разрешающей способности, которая задается в метках на единицу измерения;
- VARIANT_BOOL Level_autoSet — установка и чтение включения-выключения автоматической установки порога:
- true — включена автоматическая установка порога;
- false — выключена автоматическая установка порога (ручной режим).
- FLOAT Level_low — установка и чтение нижнего порога в единицах измерения канала (число);
- FLOAT Level_hight — установка и чтение верхнего порога в единицах измерения канала (число);
- VARIANT_BOOL Invertion — установка и чтение инвертирования направления перемещения (работает при включенной фазе Б):
- true — включено инвертирование направления перемещения;
- false — выключено инвертирование направления перемещения.
Энкодер
Программа «Энкодер» предназначена для измерения относительного положения (перемещения), скорости и направления перемещения при помощи оптических датчиков перемещения (энкодеров), подключенных к входным каналам модулей АЦП и анализаторов спектра.
На базе оптических датчиков создаются датчики линейных и угловых перемещений. Точности таких датчиков могут быть от 1 мкм до 1 мм при длине измерительной базы от 8 мм до 3 м. Датчики угловых перемещений могут иметь от 100 до 10000 маркеров на один оборот, т.е. разрешение может быть до 5 минут.
Оптическая технология предложила ряд классических способов для построения энкодера — датчика, представляющего информацию о движении, положении или направлении либо непосредственно в цифровой форме, либо генерирующего последовательность импульсов, из которой после оцифровки может быть сформирован цифровой код.

Принцип работы энкодеров проиллюстрирован на рисунке 1. Оптический энкодер состоит из тонкого оптического диска и стационарного блока — измерительной головки, включающей в себя источник света и фотодетектор. Оптический диск включает поверхность из прозрачных и непрозрачных участков. Маркерами могут быть, например, отверстия в металлическом листе или метки на стеклянном диске. При вращении диска, в зависимости от его типа, маркеры пропускают или перекрывают луч света, направленный от светового источника к фотоприемнику.
Фотодетектор генерирует сигнал частотой, равной частоте следования кодовых элементов, в цифровой форме или аналоговый импульсный сигнал, который также может быть усилен и оцифрован. При добавлении второй пары «светодиод-фототранзистор» с угловым смещением относительно первой, соответствующим четверти периода сигнала, может быть получена вторая последовательность импульсов — канал Б с фазовым смещением относительно канала А на 90°. Инкрементальный энкодер, который использует три оптических датчика, позволяет одновременно удваивать разрешение при измерении положения и скорости и детектировать направление.
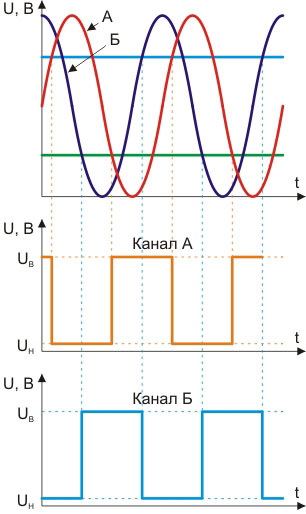
Рисунок 1
Датчики линейного и углового перемещения подключаются к модулям АЦП напрямую. Для питания датчиков можно использовать выход генератора. Разрешение инкрементальных энкодеров измеряется в импульсах за оборот (pulses per revolution, ppr). В программе «Энкодер» пользователю предоставляется возможность выбора разрешения используемого энкодера (окно «Разрешение, меток/е.и.»). «Е.и.» — единица измерения, которая может быть выбрана из ряда «мм, см, м, гр. (градусы), об. (обороты)» или прописано вручную в окне «Единица измерения».
Также в ниспадающих списках «Фаза А» и «Фаза Б» выбираются каналы подключения энкодера, к которым подключены соответствующие сигналы «Канал А» и «Канал Б». Ниспадающий список «Метка 0» предназначена для выбора канала модуля АЦП или анализатора спектра, к которому подключен сигнал синхронизации. Пороги срабатывания сигнала синхронизации устанавливаются вручную или автоматически.
При установленных галочках «Перемещение» и «Скорость» в окне программы «Энкодер» в сервере данных создаются дополнительные виртуальные каналы, содержащие соответственно информацию о перемещении и скорости.
На рисунке 2 приведены формы сигналов с каналов «Фаза А», «Фаза Б» и «Метка 0», полученные при помощи программы «Многоканальный осциллограф». На рисунке 3 показаны формы сигналов с виртуальных каналов перемещения и скорости и сигнал «Метка 0».

Рисунок 2
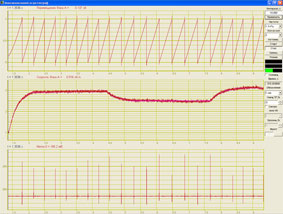
Рисунок 3
При использовании программы «Энкодер» совместно с программами из состава ZETLab и датчиками угловых перемещений, пользователь может проводить анализ крутильных колебаний и использовать эту аппаратуру для замены торсиографов.
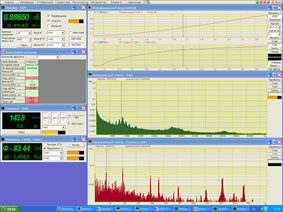
Рисунок 4
Встроенный в программу модуль управления и автоматизации из состава ZETLab Studio обеспечивает простоту и удобство при построении собственных программно-измерительных комплексов.
Назначение и описание программы Энкодер
Назначение программы
Программа Энкодер предназначена для измерения относительного положения (перемещения), скорости и направления перемещения при помощи оптических датчиков угловых или линейных перемещений (энкодеров), подключенных к входным каналам АЦП. Программа Энкодер порождает виртуальные каналы перемещения и скорости перемещения. Эти каналы доступны для последующего анализа другими программами из состава ZETLab.
На базе оптических датчиков создаются датчики линейных и угловых перемещений. Точность таких датчиков может быть от 1 мкм до 1 мм при длине измерительной базы от 8 мм до 3 м. Датчики угловых перемещений могут иметь от 100 до 10000 маркеров на один оборот, т.е. разрешение может быть от нескольких градусов до 5 минут.
Оптическая технология предложила ряд классических способов для построения энкодера-датчика представляющего информацию о движении, положении или направлении либо непосредственно в цифровой форме (абсолютные энкодеры), либо генерирующего последовательность импульсов (инкрементальные энкодеры).
Далее в описании программы Энкодер речь пойдет только об инкрементальных энкодерах, так как программа Энкодер построена для работы только с таким типом этих датчиков.
Оптический энкодер состоит из тонкого оптического диска и стационарного блока измерительной головки, включающей в себя источник света и фотодетектор. Оптический диск содержит поверхность из прозрачных и непрозрачных участков. Маркерами могут быть, например, отверстия в металлическом листе или метки на стеклянном диске. При вращении диска, в зависимости от его типа, маркеры пропускают или перекрывают луч света, направленный от светового источника к фотоприемнику.
Фотодетектор генерирует сигнал с частотой, равной частоте следования кодовых элементов в цифровой форме или аналоговый импульсный сигнал, который также может быть усилен и оцифрован. При добавлении второй пары светодиодфототранзистор с угловым смещением относительно первой, соответствующим четверти периода сигнала, может быть получена вторая последовательность импульсов — канал Б с фазовым смещением относительно канала А на 90°. Инкрементальный энкодер, который использует два оптических канала, позволяет одновременно удваивать разрешение при измерении положения и скорости и определять направление. Третий канал используется для привязки к начальной отметке (метка «0»).
Описание программы
Для запуска программы Энкодер необходимо из меню Измерение панели ZЕТLab выбрать команду Энкодер. На экране монитора отобразится рабочее окно программы Энкодер. В заголовке окна программы будет отображаться название программы и название канала, к которому подключен канал А (фаза А) оптического датчика перемещения (энкодера).
Примечание: программу Энкодер можно запустить непосредственно из рабочей директории ZETLab (по умолчанию: c:\ZETLab\). Имя запускаемого файла: Encoder.exe
Рис.1
Рис.2
В левой верхней части рабочего окна программы Энкодер расположен графический индикатор, в котором отображаются измеренные угловое или линейное перемещение (положение) и скорость перемещения, информация о которых поступает с выбранного (выбранных) канала. В зависимости от поставленной задачи перемещение измеряется в указанных единицах измерения, а скорость перемещения в единицах измерения в секунду. Например, для измерения перемещение в миллиметрах необходимо в списке Единица измерения (список описывается ниже) указать единицу измерения миллиметры (мм), после этого перемещение на графическом индикаторе будет отображаться в мм, а скорость перемещения в мм/с (миллиметров в секунду).
В списке, расположенном справа от надписи Единица измерения, выбирается либо вводится с клавиатуры единица измерения, в которой будет отображаться сигнал по выбранному каналу. Для выбора необходимой единицы измерения необходимо нажать левой кнопкой «мыши» на кнопку списка, и, в раскрывшемся списке, выбрать нужную единицу измерения. Если в списке нет необходимой единицы измерения, то, нажав правой клавишей «мыши» на поле списка, с клавиатуры ввести требуемую единицу измерения.
Разрешение инкрементальных энкодеров определяется количеством импульсов за один оборот (pulses per revolution, ppr). В списке, расположенном справа от надписи Разрешение меток/е.и., выбирается необходимое количество меток в установленную единицу измерения. Например, инкрементальный энкодер углового перемещения имеет 1080 меток на один оборот, соответственно 3 метки на один градус поворота. Необходимо измерять положение энкодера в градусах с точность измерения в один градус. Для этого, в списке Единица измерения выбирается единица измерения – градусы (гр.), а в списке Разрешение меток/е.и. устанавливается 3 (три метки на один градус поворота энкодера). Устанавливается необходимое разрешение нажатием левой кнопки «мыши» по кнопкам списка разрешения, либо, нажав левой кнопкой «мыши» по полю списка разрешения, прокрутив ролик «мыши», либо, нажав левой кнопкой «мыши» по полю списка разрешения, ввести значение с клавиатуры и нажать клавишу.
Под полем списка Разрешение меток/е.и. располагается кнопка Сброс, нажатие которой приводит к обнулению значения перемещения (положения).
Флажки Перемещение и Скорость, расположенные справа от графического индикатора, разрешают включение/выключение виртуальных каналов Перемещение и Скорость, порождаемых программой Энкодер. Эти каналы доступны для последующего анализа другими программами. Установленные флажки – виртуальные каналы включены, снятые – выключены. Данные в этих виртуальных каналах идут в темпе обработки каждого импульса без усреднения. Это позволяет исследовать не только перемещение и скорость перемещения, но и их неравномерность. При включении энкодера совместно с другими датчиками, например, давления или температуры, данные с этих датчиков и данные перемещения и скорости перемещения идут синхронно с точностью до одного импульса энкодера.
Флажок Инверсия, который становится доступным для установки или снятия при установленном флажке Фаза В, позволяет инвертировать сигнал направления перемещения. Установленный флажок – происходит инверсия, снятый – сигнал не инвертирован.
Для измерения перемещения и скорости перемещения по физическому каналу, к которому подключен канал А энкодера, необходимо в поле списка (со стрелкой), расположенному справа от надписи Фаза А, выбрать название этого канала.
При использовании в измерениях канала В энкодера необходимо установить флажок, расположенный справа от надписи Фаза В, и, в ставшем доступным поле списка выбрать название включенного физического канала, к которому подключен канал В энкодера. Снятие флажка Фаза В блокирует поле списка выбора канала В и флажок установки инверсии.
При необходимости вычисления абсолютного положения необходимо установить флажок, расположенный справа от надписи Метка 0, и, в ставшем доступным поле списка выбрать название включенного физического канала, к которому подключен канал нулевой метки энкодера. Каждый раз, при прохождении нулевой метки пары светодиодфототранзистор происходит обнуление на графическом индикаторе измеренных показаний перемещения. Например, это удобно при измерении линейных перемещений, при которых происходит возвратнопоступательное перемещение. Установив нулевую метку посередине можно измерять перемещение в ту или другую сторону относительно установленной нулевой метки.
Флажок Авто порог служит для включения/выключения автоматической/ручной установки верхнего и нижнего порога входного уровня, по которому будут производиться измерения перемещения. Установленный флажок – программа сама автоматически устанавливает верхний и нижний порог уровня сигнала. Снятый флажок – разрешен ручной ввод верхнего и нижнего порога уровня сигнала.
Поля ввода, расположенные под флажком Авто порог, служат для установки верхнего и нижнего порога в ручном режиме (флажок Авто порог снят). Верхнее поле ввода служит для установки верхнего порога, нижнее – для установки нижнего порога. Ввод значений верхнего и нижнего порога осуществляется с клавиатуру. После ввода значений нажать клавишу клавиатуры. При установленном флажке Авто порог поля ввода верхнего и нижнего порога не доступны для ввода значений. Верхний и нижний порог устанавливается для исключения ложных срабатываний при измерении перемещения. Для правильного измерения перемещения верхний порог не должен превышать максимального уровня сигнала по этому каналу, нижний порог не должен быть ниже минимального уровня. Определить максимальный и минимальный уровень сигнала по каналу, к которому подключен энкодер, можно, например, запустив программу Многоканальный осциллограф выбрать этот канал и по осциллограмме оценить эти уровни. Для выхода из программы необходимо нажать кнопку, расположенную в правом верхнем углу окна.
При использовании программы Энкодер совместно с программами из состава ZETLab и датчиками угловых перемещений, пользователь может проводить анализ крутильных колебаний и использовать эту аппаратуру для замены торсиографов.
Подключение датчиков
Датчики линейных или угловых перемещений подключаются к входным каналам (АЦП) устройств, производимых ООО «Электронные технологии и метрологические системы», напрямую.
После подключения энкодера к входным каналам необходимо в программе Настройка параметров АЦП и ЦАП включить эти каналы либо убедиться, что они включены.
Для измерения перемещения (положения) и скорости перемещения необходимо в программе Редактирование файлов параметров настроить параметры каналов, к которым подключен энкодер. Параметры измерительных каналов должны быть настроены относительно измерения напряжения.
Каналы для измерения выбираются любые, название каналов пользователь вводит по своему усмотрению.
Для питания датчиков можно использовать как выход встроенного генератора (при условии комплектации встроенным генератором) в режиме генерирования синусоидального сигнала с постоянным смещением нуля, так и внешний источник питания.
Математическое описание
Энкодер — устройство, предназначенное для преобразования угла поворота вращающегося объекта (вала) в электрические сигналы, позволяющие определить угол его поворота. Энкодеры подразделяются на инкрементальные и абсолютные. Инкрементальный энкодер выдает за один оборот определенное количество импульсов. А абсолютные энкодеры позволяют в любой момент времени знать текущий угол поворота оси, в том числе и после пропадания и восстановления питания. А многооборотные абсолютные энкодеры, кроме того, также подсчитывают и запоминают количество полных оборотов оси. Энкодеры могут быть как оптические, резисторные, так и магнитные и могут работать через шинные интерфейсы или промышленную сеть.
Инкрементальные энкодеры предназначены для определения угла поворота вращающихся объектов. Они генерируют последовательный импульсный цифровой код, содержащий информацию относительно угла поворота объекта. Если вал останавливается, то останавливается и передача импульсов. Основным рабочим параметром датчика является количество импульсов за один оборот. Мгновенную величину угла поворота объекта определяют посредством подсчёта импульсов от старта. Для вычисления угловой скорости объекта процессор в тахометре выполняет дифференцирование количества импульсов во времени, таким образом, показывая сразу величину скорости, то есть число оборотов в минуту. Выходной сигнал имеет два канала, в которых идентичные последовательности импульсов сдвинуты на 90° относительно друг друга (парафазные импульсы), что позволяет определять направление вращения. Имеется также цифровой выход нулевой метки, который позволяет всегда рассчитать абсолютное положение вала.
Принцип работы инкрементальных энкодеров проиллюстрирован на рисунке 1. Оптический энкодер состоит из тонкого оптического диска и стационарного блока — измерительной головки, включающей в себя источник света и фотодетектор. Оптический диск содержит поверхность из прозрачных и непрозрачных участков. Маркерами могут быть, например, отверстия в металлическом листе или метки на стеклянном диске. При вращении диска, в зависимости от его типа, маркеры пропускают или перекрывают луч света, направленный от светового источника к фотоприемнику.
Фотодетектор генерирует цифровой сигнал с частотой, равной частоте следования кодовых элементов или аналоговый импульсный сигнал, который также может быть усилен и оцифрован. При добавлении второй пары светодиод-фототранзистор с угловым смещением относительно первой, соответствующим четверти периода сигнала, может быть получена вторая последовательность импульсов — канал Б с фазовым смещением относительно канала А на 90°. Инкрементальный энкодер, который использует два оптических канала, позволяет одновременно удваивать разрешение при измерении положения и скорости и определять направление. Третий канал используется для привязки к начальной отметке (метка «0»).
Рис.1
Абсолютные энкодеры, как оптические, так и магнитные имеют своей основной рабочей характеристикой число шагов, то есть уникальных кодов на оборот и количество таких оборотов, при этом не требуется первичной установки и инициализации датчика. Поэтому абсолютные энкодеры не теряют свою позицию при исчезновении напряжения.
Наиболее распространённые типы выходов сигнала — это код Грея, параллельный код, интерфейсы Profibus-DP, CANopen, DeviceNet, SSI, LWL, через которые также осуществляется программирование датчиков.
Абсолютный энкодер относится к типу энкодеров, который выполняет уникальный код для каждой позиции вала. В отличие от инкрементного энкодера, счетчик импульсов не нужен, т.к. угол поворота всегда известен. Абсолютный энкодер формирует сигнал как во время вращения, так и в режиме покоя. Диск абсолютного энкодера отличается от диска пошагового энкодера, так как имеет несколько концентрических дорожек. Каждой дорожкой формируется уникальный двоичный код для конкретной позиции вала.
Абсолютный энкодер не теряет своего значения при потере питания и не требует возвращения в начальную позицию. Сигнал абсолютного энкодера не подвержен помехам и для него не требуется точная установка вала. Кроме того, даже если кодированный сигнал не может быть прочитан энкодером если, например, вал вращается слишком быстро, правильный угол вращения будет зарегистрирован, когда скорость вращения уменьшится. Абсолютный энкодер устойчив к вибрациям.
Код Грея предпочтительнее обычного двоичного тем, что обладает свойством непрерывности бинарной комбинации: изменение кодируемого числа на единицу соответствует изменению кодовой комбинации только в одном разряде. Он строится на базе двоичного по следующему правилу: старший разряд остается без изменения; каждый последующий разряд инвертируется, если предыдущий разряд исходного двоичного кода равен единице. Этот алгоритм построения может быть формально представлен как результат сложения по модулю два исходной комбинации двоичного кода с такой же комбинацией, но сдвинутой на один разряд вправо. При этом крайний правый разряд сдвинутой комбинации отбрасывается.
Таким образом, Грей-код является так называемым одношаговым кодом, т.к. при переходе от одного числа к другому всегда меняется лишь какой-то один бит. Погрешность при считывании информации с механического кодового диска при переходе от одного числа к другому приведет лишь к тому, что переход от одного положения к другом будет лишь несколько смещен по времени, однако выдача совершенно неверного значения углового положения при переходе от одного положения к другому полностью исключается. Преимуществом Грей-кода является также его способность зеркального отображения информации. Так, инвертируя старший бит можно простым образом менять направление счета и, таким образом, подбирать к фактическому (физическому) направлению вращения оси. Изменение направления счета может легко изменяться, управляя так называемым входом Complement. Выдаваемое значение может быть возрастающим или спадающим при одном и том же физическом направлении вращения оси.
Поскольку информация, выраженная в Грей-коде, имеет чисто кодированный характер не несущей реальной числовой информации, должен он перед дальнейшей обработкой сперва преобразован в стандартный бинарный код. Осуществляется это при помощи преобразователя кода (декодера Грей-Бинар), который к счастью легко реализуется с помощью цепи из логических элементов «исключающее или» ( XOR ) как программным, так и аппаратным способом (см. схему ниже).
Из таблицы видно, что при переходе от одного числа к другому (соседнему) лишь один бит информации меняет свое состояние, если число представлено кодом Грея, в то время, как в двоичном коде могут поменять свое состояние несколько бит одновременно. Код Грея — выход, следовательно, он никогда не имеет ошибку чтения и применяется во многих абсолютных энкодерах.
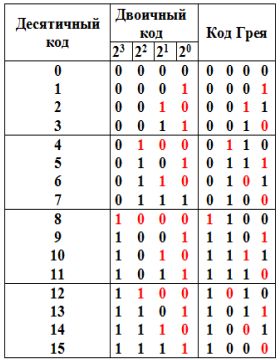
Биты меняющие свое состояние, при переходе от одного числа к другому, обозначены красным цветом.
Однооборотный энкодер.
Однооборотными ( Single — Turn ) датчиками называются датчики, которые выдают абсолютное значения в пределах одного оборота, т.е. в радиусе 360°. После одного оборота код является полностью пройденным и начинается опять с его начального значения. Эти датчики служат, преимущественно, для измерения угла поворота и применяются, например, в антенных системах, эксцентричных коленчатых прессах и т.д.
Многооборотный энкодер
Линейные перемещения предполагают необходимым применение измерительной системы с n -количеством оборотов. Например, при линейных приводах или при задачах измерения с помощью зубчатой измерительной штанги, применение однооборотных датчиков является неприемлемым. В этом случае приходят на помощь датчики, где дополнительно к измерению угла поворота в пределах одного оборота также происходит регистрация количества оборотов с помощью дополнительно встроенного передаточного механизма, т.е. своего рода редуктора из нескольких кодовых оптических дисков, образуя, таким образом, многооборотный энкодер ( Multi — Turn ).
Оптические энкодеры
Оптические энкодеры имеют жёстко и закреплённый соосно валу стеклянный диск с прецизионной оптической шкалой. При вращении объекта оптопара считывает информацию, а электроника преобразовывает её в последовательность дискретных электрических импульсов. Абсолютные оптические энкодеры — это датчики угла поворота, где каждому положению вала соответствует уникальный цифровой выходной код, который наряду с числом оборотов является основным рабочим параметром датчика. Абсолютные оптические энкодеры, так же как и инкрементальные энкодеры, считывают и фиксируют параметры вращения оптического диска.
Магнитные энкодеры
Магнитные энкодеры с высокой точностью регистрируют прохождение магнитных полюсов вращающегося магнитного элемента непосредственно вблизи чувствительного элемента, преобразуя эти данные в соответствующий цифровой код.
Механические и оптические энкодеры с последовательным выходом
Содержат диск из диэлектрика или стекла с нанесёнными выпуклыми, проводящими или непрозрачными участками. Считывание абсолютного угла поворота диска производится линейкой переключателей или контактов в случае механической схемы и линейкой оптронов в случае оптической. Выходные сигналы представляют собой код Грея, позволяющий избавиться от неоднозначности интерпретации сигнала.
Кликните здесь, чтобы добавить текст