
Определение пределов погрешности поддержания ускорения
Определение пределов погрешности поддержания ускорения и (или) перемещения следует осуществлять для установок, оснащенных аппаратурой автоматического управления режимом испытания. Если у Вас есть система управления вибростендом ZET 017-U, значит у Вас есть система автоматического управления режимами испытания!
В состав ZETLAB VIBRO входят программы «Генератор с обратной связью (Синусоидальная вибрация)».
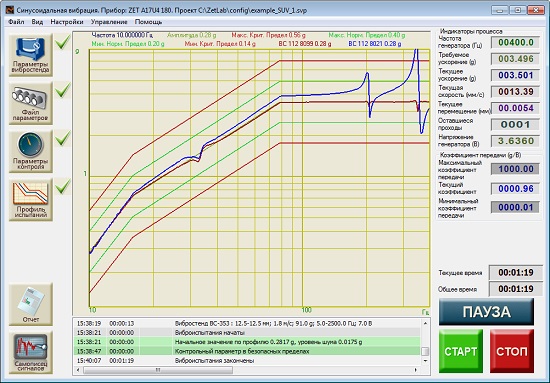
Рисунок 1
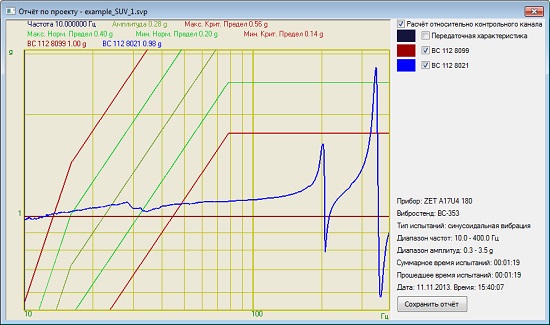
Рисунок 2
Для измерения «АЧХ с обратной связью» необходимо минимум два датчика: один контрольный, другой измерительный. После прохождения профиля необходимо открыть отчет о прошедших испытаниях, выбрать измерительный канал (контрольный выбирать не обязательно) и установить галочку в поле «Расчет относительно контрольного канала». На рисунке 2 представлен результат работы программы при снятии АЧХ реального вибростенда. На графике хорошо видны скачки изменения виброускорения в зависимости от частоты. Данные пики и провалы, как правило, наблюдаются при переходе через резонансные частоты вибростенда.
Пределы погрешности поддержания ускорения и (или) перемещения определяются по формуле:
где af — текущее значение ускорения или перемещения; aз — заданное значение ускорения или перемещения.
См. также:
- Аттестация вибростендов;
- Аттестация вибростендов > Опробование установки;
- Аттестация вибростендов > Определение нестабильности виброускорения и частоты;
- Аттестация вибростендов > Определение диапазонов виброускорения, виброперемещения и частоты;
- Аттестация вибростендов > Определение коэффициентов гармоник ускорения и/или перемещения;
- Аттестация вибростендов > Определение коэффициентов поперечных составляющих;
- Аттестация вибростендов > Определение коэффициента неравномерности распределения;
- Аттестация вибростендов > Определение резонансной частоты подвески и первой резонансной частоты подвижной системы;
- Аттестация вибростендов > Определение вибрационного шума на столе вибростенда;
- Аттестация вибростендов > Определение пределов погрешностей воспроизведения ускорения и перемещения в контрольной точке;