Subsistema del Sistema de supervisión de salud estructural
Monitoreo de frecuencia propia de fluctuaciones y del decrement logarítmico de amortiguaciones
Para detectar cambios del estado de tensión y deformación del estado de construcciones ya hace mucho tiempo y en especial en los últimos 10-15 años se utilizan los métodos dinámicos de sondeo de edificios y construcciones que se basan en la medición de períodos y decrementos logarítmicos de fluctuaciones propias de edificios y construcciones.
Las fluctuaciones de edificios y construcciones de puente pueden aparecer a causa de la influencia de trabajos de construcción realizados al lado, del movimiento de diferentes transportes o por otros factores tecnogénicos. Por lo tanto para los edificios altos aparece la necesidad de detectar cambios de estado de tensión y deformación de construcciones y localización de lugares de tal cambio con el uso de otros métodos que permiten automatizar el proceso de mediciones.
La superación del nivel permitido del estado de tensión y deformación pueden, en algunas condiciones, llevar a una destrucción parcial o total de estas construcciones y a otra consecuencias negativas. La historia tiene muchos ejemplos de tales consecuencias: el puente Eguipetskiy en San Petersburgo, el puente de Tacoma Narrows en los EE.UU, el puente Volgogradskiy en Volgograd y otros.
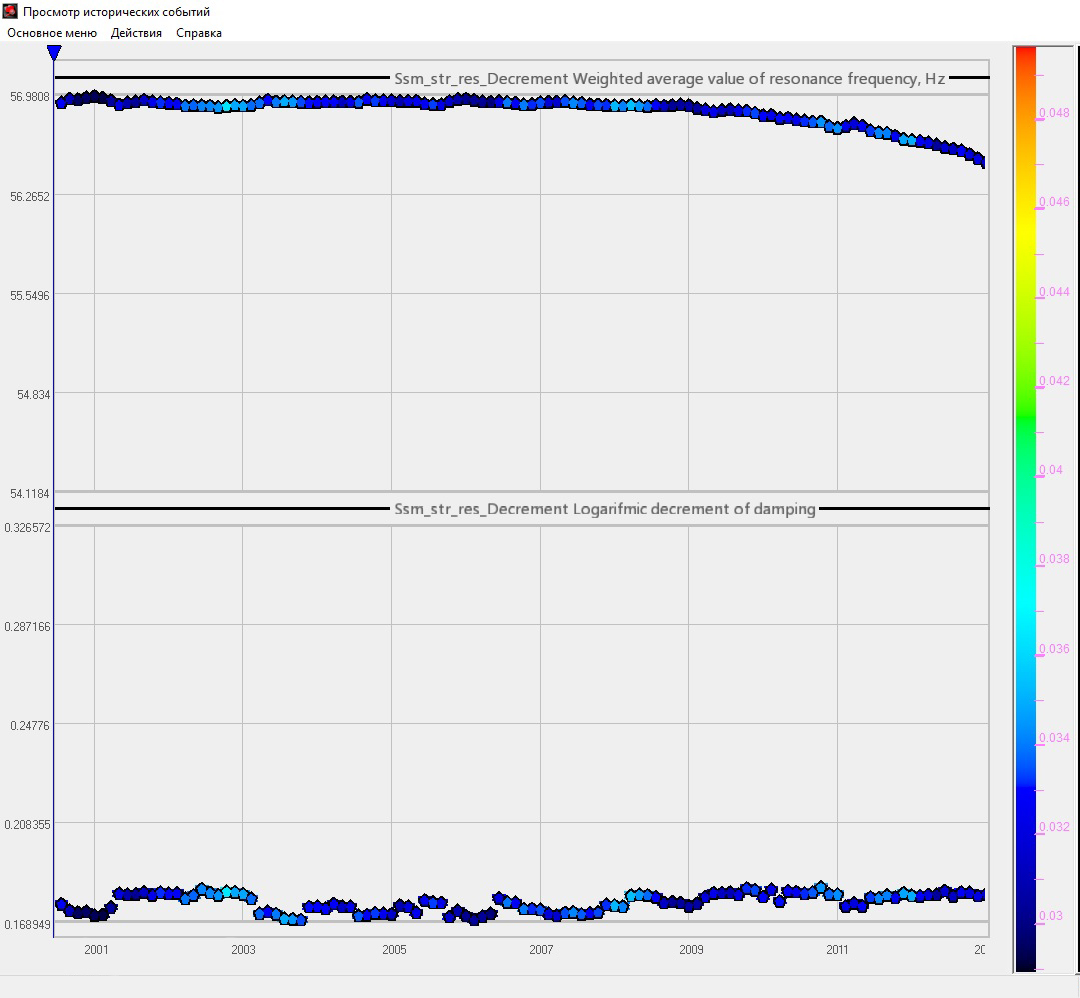
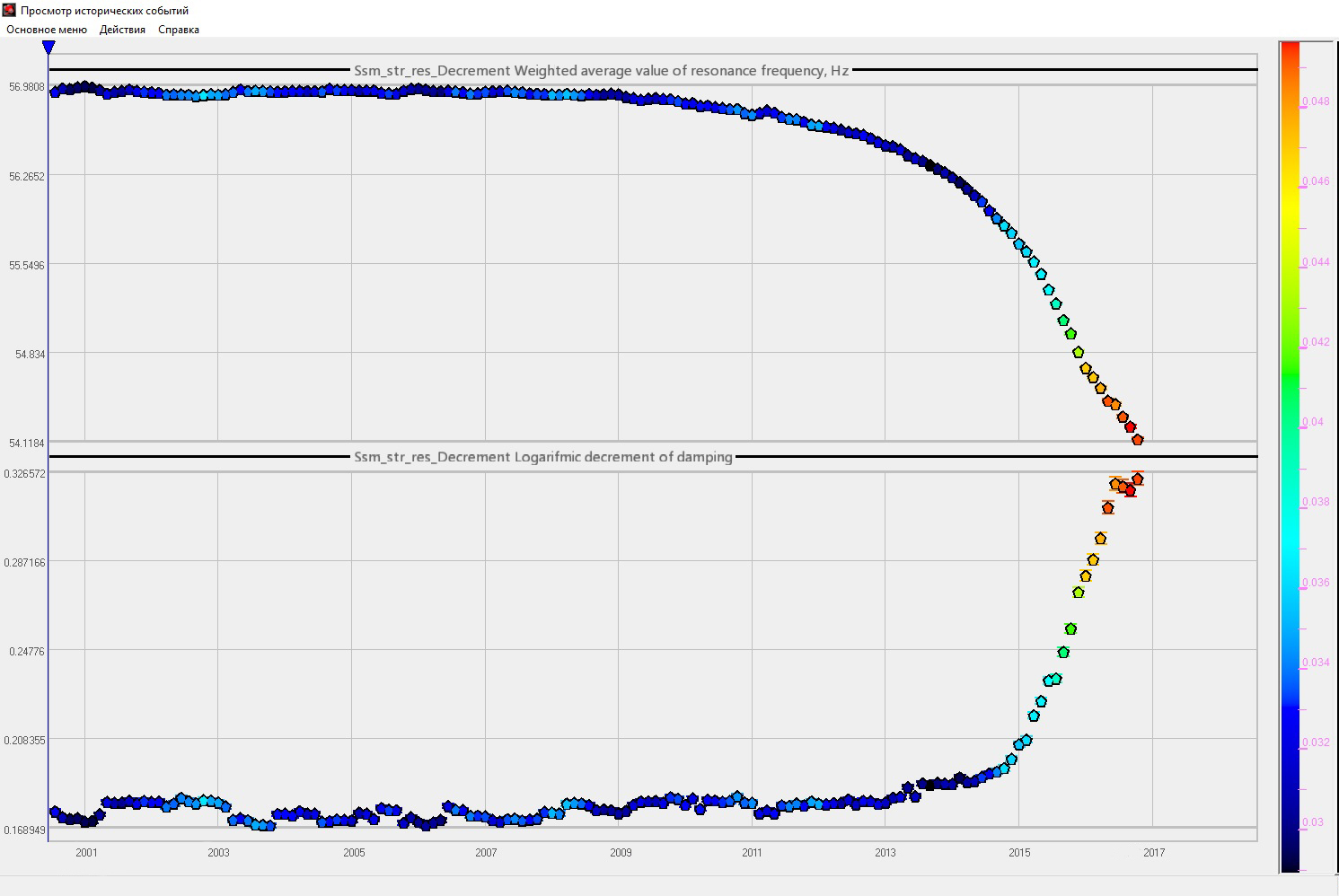
El subsitema del Sistema de supervisión de salud estructural “Monitoreo de la frecuencia propia de fluctuaciones y del decremento logarítmico” permite en régimen automatizado señalar sobre el nivel permitido del estado de tensión y deformación para advertir casos peligrosos de avería.

El subsistema funciona a base de sensores digitales ZET 7152-N y ZET 7156 y proporciona control de la vibroaceleración de elementos de construcciones, períodos de frecuencias propias de fluctuaciones de edificios (construcciones) y garantiza el control de la vibroaceleración de los elementos de construcciones, períodos de frecuencias propias de fluctuaciones de edificios (construcciones) y decrementos logarítmicos de amortiguación que les correspondan.
Características prinicipales
| Parámetro controlado | Frecuencia propia de fluctuaciones | Decremento de amortiguación | Aceleración | Velocidad |
| Tipo de módulo/sensor digital | ZET 7156 | ZET 7152‑N | ZET 7156 | |
| Unidad de medición | Hz | – | m/seg2 | mkm/с |
| Intervalo de mediciones | 0,5…20 | 0,05…0,9 | -140…+140 | 0,1…250 |
| Cambio mínimo registrado | 0,02 % | 2 % | 0,1 | 0,1 |
| Nivel mínimo ALARM | 2 % | 10 % | 3 | 2 |